Social Triangles and Aggressive Lines: Multi-Robot Formations Impact Navigation and Approach
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
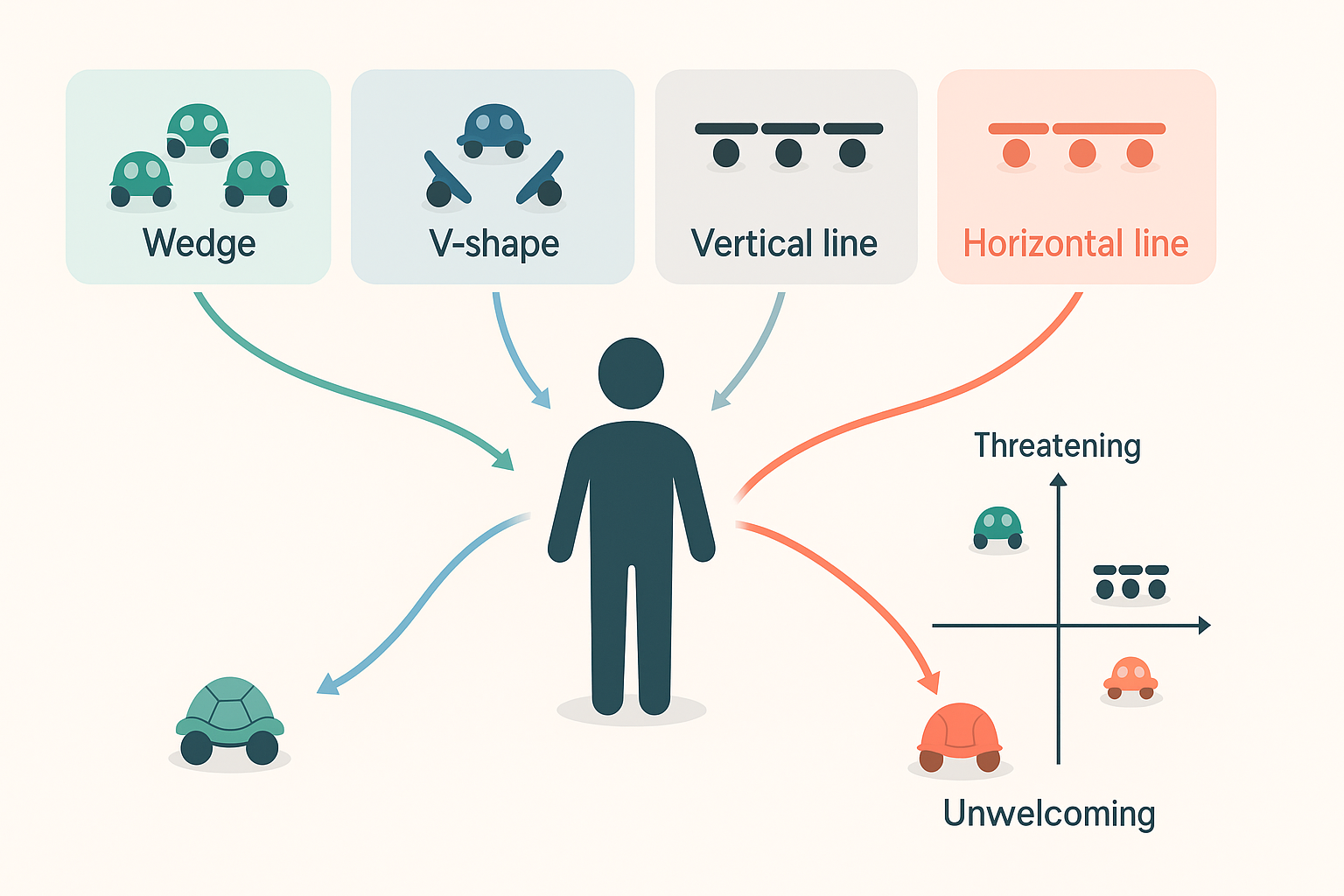
Investigates how different multi-robot formations affect navigation and approach behaviors in social environments. Demonstrates the impact of formation geometry on human-robot interaction and navigation efficiency.