An Exploratory Study of Bayesian Prompt Optimization for Test-Driven Code Generation with Large Language Models
arXiv, 2025
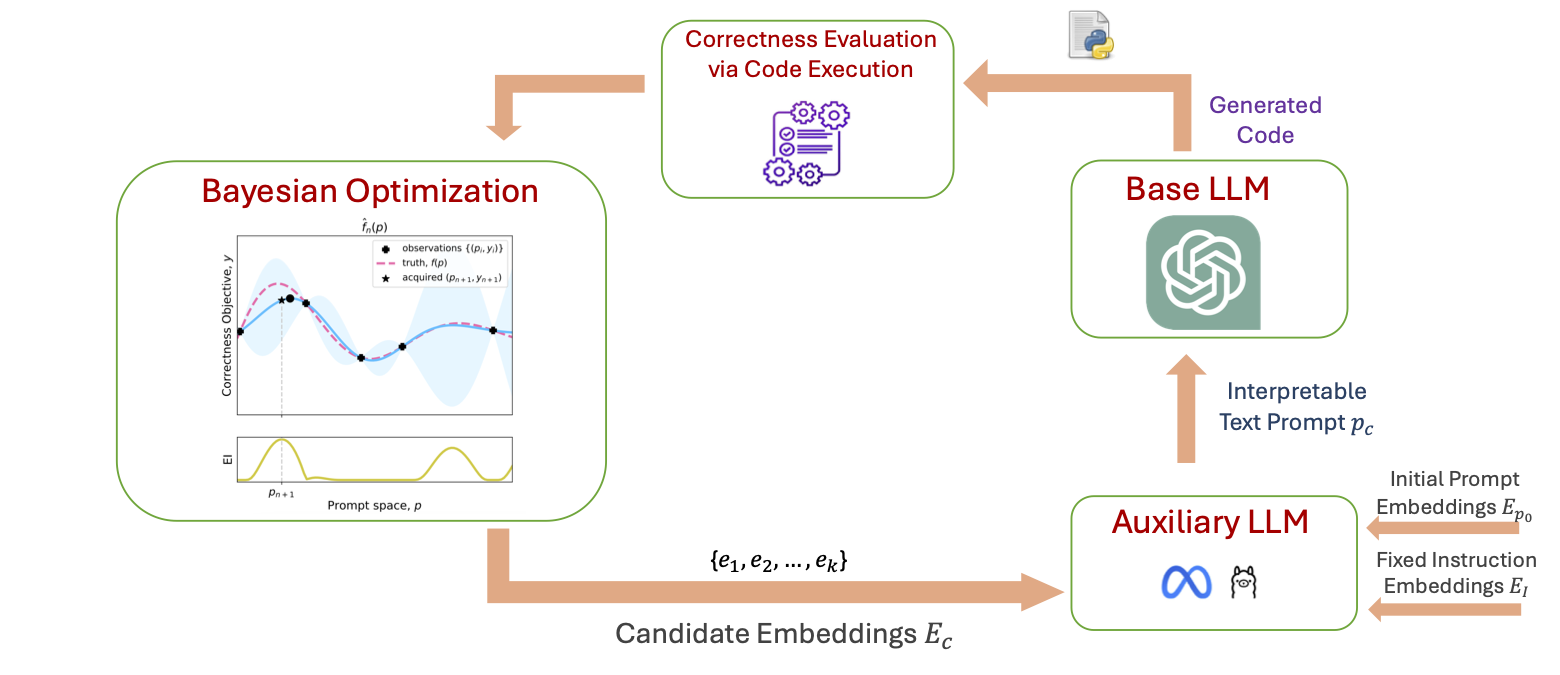
Explores Bayesian optimization as a principled approach to automated prompt search for large language model–based code generation. Demonstrates sample-efficient improvements in functional correctness over strong prompting baselines on the HumanEval+ benchmark.